The trend away from wired communication to wireless data TX/RX is evident virtually everywhere. For example, stepping over bundles of cables running between cubicles in offices or machines in a factory were once common workplace necessities. In many of these environments today, data communication between electronic equipment is primarily done by Wi-Fi or Bluetooth.
In harsh environments; however, controller-area network (CAN) cable-based systems are used extensively. These communication systems allow microprocessor-driven devices in automobiles and other challenging environments to be monitored and controlled without a central computer. By understanding the CAN bus architecture for rugged industries, you can best design PCBAs that will operate reliably in any environment.
CAN Bus Applications
Originally introduced for automotive systems data communications by Bosch in the mid-1980s, usage of CAN bus has grown dramatically. Today, CAN bus architectures can be found in many rugged industry applications, as shown below.
The widespread utilization of the CAN bus is due to its distributed networking structure and well-defined protocol. CAN bus networks do not require a central computer for data TX/RX control. Since 1993, the architecture for instituting a CAN bus network architecture has been stipulated by the ISO 11898 standard(s) that ensures interoperability between devices, which is critical for rugged industry implementations like automotive and aerospace where failure is often not an option.
The CAN Bus Architecture for Rugged Industries
In addition to initial intent, the CAN bus architecture has several attributes that make it attractive in environments where sophisticated and/or complex computing is not necessary. This includes the use of electronic control units (ECUs) that establish a multi-master network consisting of nodes as shown below.
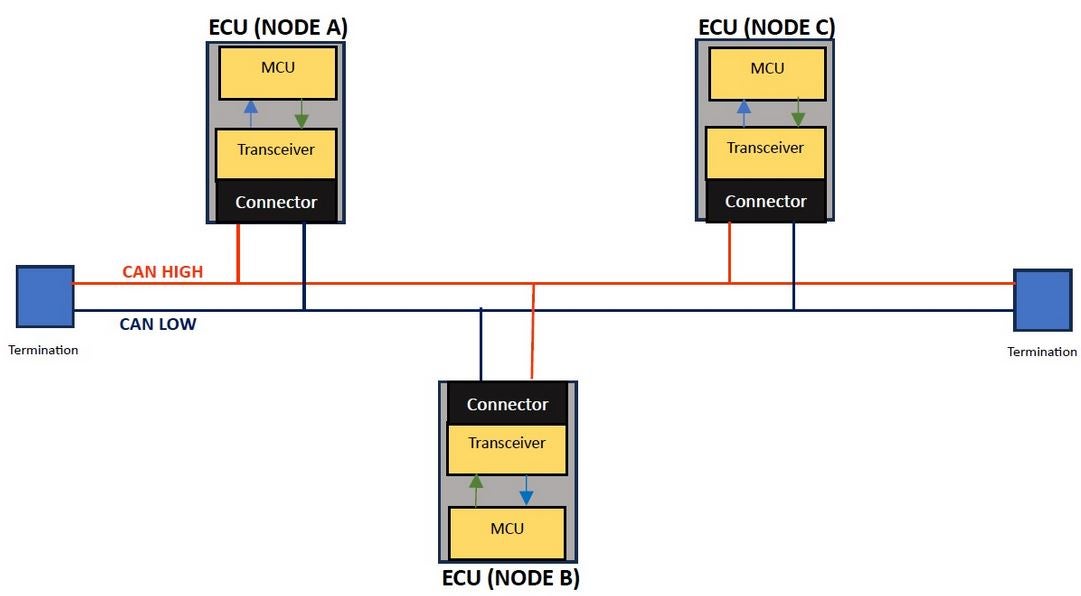
As shown above, each EDU or node is comprised of a local processor/controller, a TX/RX unit and connector, all of which may be packaged in a single device. During transmission, signals along a CAN bus are either CAN High (Hi) or CAN Low (Lo), approximately 3.5V and 1.5V, respectively. This simplistic signaling is another attractive feature of CAN bus implementation in harsh environments. Other benefits of a CAN bus architecture for rugged industries are:
Advantages of CAN Bus Architecture for Rugged Industries:
- Easy to build
- Durable operation
- Cost effective
- Easy to modify
The degree of realization of the benefits above depends on the quality of your design.
Using the CAN Bus Architecture in Your Design
When developing PCBs for CAN bus implementation, it is important to follow good guidelines for the entire design process from schematic to manufacturing. Additional considerations; as listed below, should also be incorporated for rugged industries deployment.
The absence of a central controller is one of the advantages of using the CAN bus architecture. Since nodes transmit independently, efficient arbitration–the process by which bus ownership by a particular node is determined–is critical for successful operation. This requires all nodes to transmit at the same standard bit rate. The fastest rate, high-speed CAN with flexible data rate (CAN-FD), 2 or 5 Mbps.
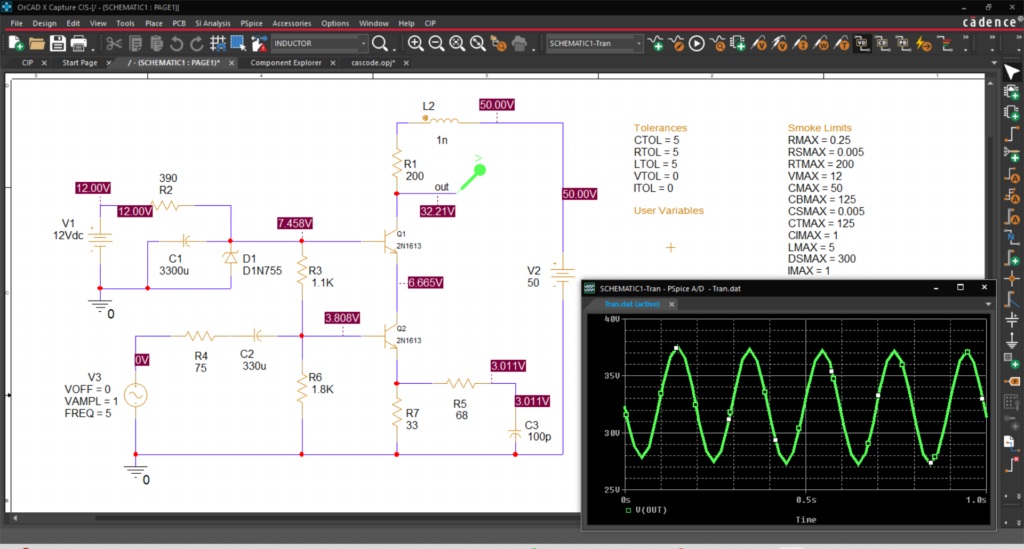
The best way to evaluate the signaling of your CAN bus board is to employ a product development tool. Doing so will allow you to verify operation and optimize your design for first-time right build. The right simulation software for timing analysis should include advanced analysis capabilities, easily integrate with your EDA software and provide comprehensive and usable results. Partnering with an industry expert in providing the tools engineers need to innovate may be the path to successfully designing a CAN bus architecture for rugged industries that meets your objectives.
EMA Design Automation is a leading provider of the resources that engineers rely on to accelerate innovation. We provide solutions that include PCB design and analysis packages, custom integration software, and engineering expertise, which enable you to create more efficiently. For more information on how to best design a CAN bus architecture for rugged industries and how we can help you or your team innovate faster, contact us.